

Estimates indicate that by 2050 the U.S. will incur a two-fold increase in the incidence of amputation and stroke, due largely to the prevalence of vascular disease. These disabilities severely limit mobility and social activity for millions of Americans, whose ambulation is slower, less stable, and less efficient than that of able-bodied persons. The projected increase in mobility-related disabilities therefore presents a grand challenge to the American workforce and healthcare system. This motivates our research on high-performance wearable robots to enable mobility and improve quality of life for persons with disabilities.
Subscribe to our YouTube channel: Bionic Locomotion
Phase-Based Control of Prosthetic Legs
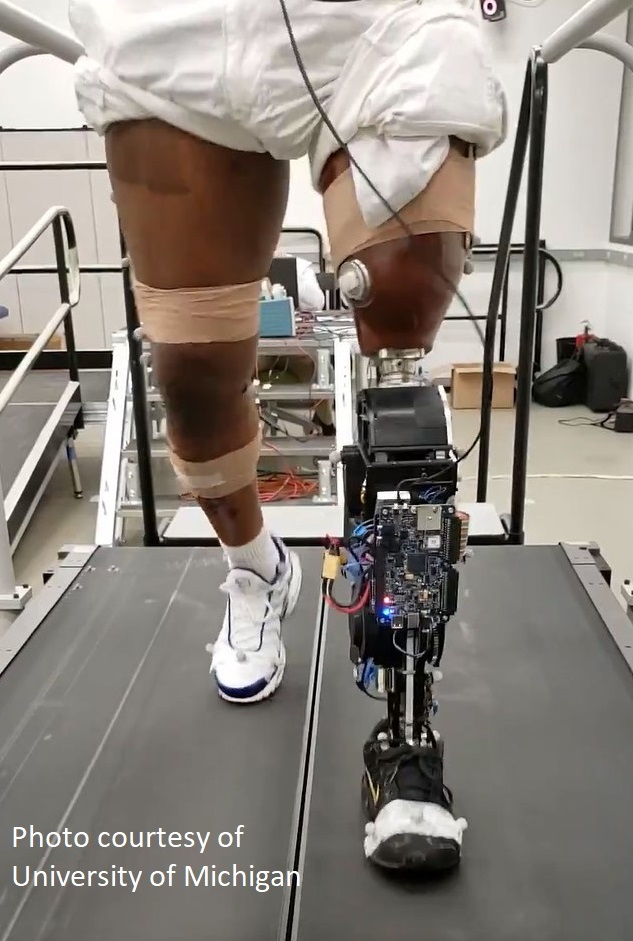
Even with the help of modern prosthetic devices, individuals with lower-limb amputation often struggle to walk in the home and community. Emerging powered prosthetic legs have motors that can actively assist patients to enable greater mobility, but these devices are currently designed to produce a small set of pre-defined motions. Finite state machines are typically used to switch controllers between discrete phases of the gait cycle, e.g., heel contact vs. toe contact, and between different tasks, e.g., uphill vs. downhill. However, this discrete methodology cannot continuously synchronize the prosthetic leg’s motion to the timing or activity of the human user. We are investigating a continuous parameterization of human joint patterns based on 1) a phase variable that robustly represents the timing of the human gait cycle, and 2) task variables representing continuous variations of steady-state activities (e.g., walking at different speeds/inclines) or continuous transitions between activities (e.g., walk to stair ascent). This needs-driven work at the scientific interface between robot control theory and physical rehabilitation will enable greater mobility in amputee populations and beyond.
Key Papers: TRO 2023, TNSRE 2020, TRO 2018, TNSRE 2017
This material is based upon work supported by the National Institutes of Health under Grant Numbers DP2HD080349 and R01HD094772 and by the National Science Foundation under Grant Numbers 1949346 and 2024237.
Task-Invariant, Energetic Control of Exoskeletons
Traditional control methodologies for rehabilitation orthoses/exoskeletons aim to replicate normative joint kinematics and thus fall into the category of kinematic control. This control paradigm depends on pre-defined reference trajectories, which can be difficult to adjust between different locomotor tasks and human subjects. These strategies tend to compensate for chronic deficits rather than enable training and recovery of normative gait. A paradigm shift from task-specific, kinematic control approaches to task-invariant, energetic control approaches is needed for wearable robots to assist their human users across activities. Therefore, we are investigating a novel control methodology for shaping the potential energy or total energy of the human body with wearable actuators. Because this control method does not depend on pre-defined kinematic patterns, it is ideally suited for task-invariant control of exoskeletons, both for performance augmentation and rehabilitation purposes. In this paradigm, wearable actuators can reduce mass/inertia parameters in body energetics to dynamically offload the weight of a stroke patient who otherwise would be supported by multiple therapists during gait rehabilitation. This innovation in dynamics and control will enable powered orthoses to assist humans in a variety of activities, which cannot be achieved with state-of-art control strategies based on pre-defined, task-specific joint kinematics.
Key Papers: OJCSYS 2022, CSM 2018
This material is based upon work supported by the National Science Foundation under Grant Number 1652514 / 1949869 and by the National Institutes of Health under Grant Number R01EB031166.
Wearable Actuator Design for High-Performance Torque Control
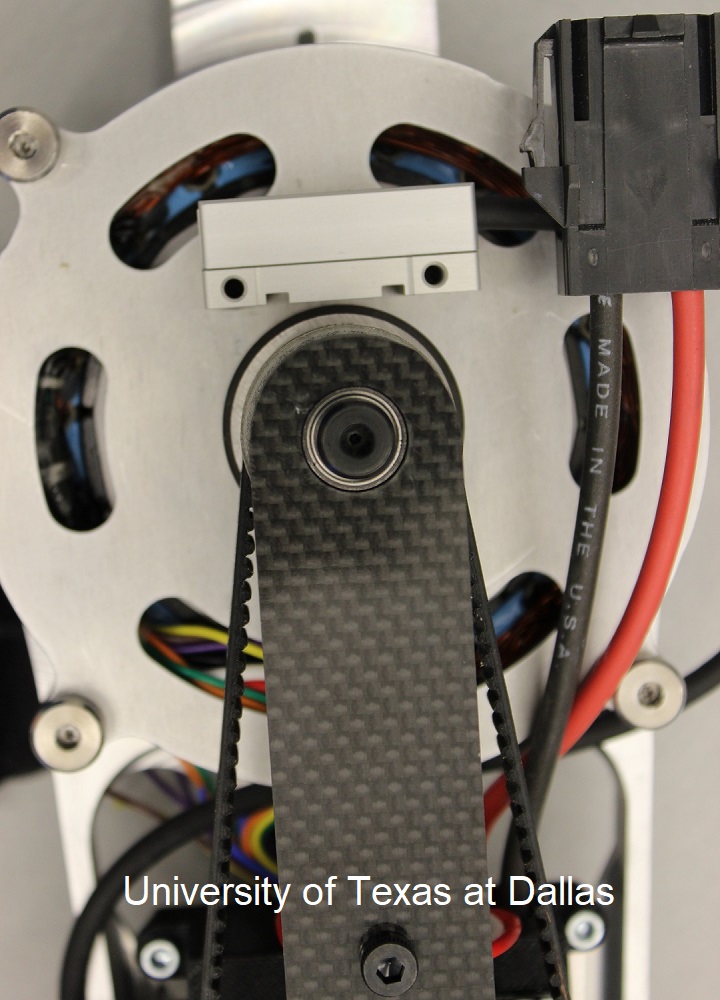
Actuators for lower-limb orthoses and prostheses must balance the requirements of high output torque and low weight. This is typically achieved using a small (high-speed) motor with a high-ratio transmission, e.g., ball screw or harmonic drive. However, higher ratio transmissions tend to be less efficient, resulting in energy losses and less accurate torque control. The use of a high transmission ratio also results in high mechanical impedance, which means that the user cannot move (or “backdrive”) the joint without help from the actuator. Backdrivability may not be necessary for patients who cannot contribute to their walking gait, e.g., patients with spinal cord injuries. For patients who still have some control of their legs, backdrivable actuators can promote user participation and provide comfort. We are designing compact, lightweight, wearable actuators using custom high-torque motors with custom low-ratio transmissions (24:1 or less) to achieve high output torques with very low backdrive torques. This class of actuators can also swing freely, absorb forceful impacts, and regenerate energy during human locomotion. All of these features are desirable in powered prosthetic legs for lower-limb amputees. These actuators will also enable the design of partial-assist orthoses and exoskeletons that encourage user participation during stroke rehabilitation or enhance performance of able-bodied users.
Key Papers: RAL 2022, TMECH 2021, TRO 2020
Adaptive Optimization of Powered Prostheses and Orthoses
The objective of this project is to understand model-free, adaptive optimization methods with varying time-scales and competing objectives in order to enable real-time auto-tuning of powered prosthetic legs. Visit this Project Webpage.
Decentralized Feedback Control of Copperative Robotic Walking
The objective of this project is to investigate decentralized feedback control strategies for legged robots with cooperative subsystems, including powered prosthetic legs.