
Control Design for Robot-Assisted Walking
Dates: 2011-2013
This project aims to translate theoretical control approaches from robot walking into biomimetic control strategies for clinically viable wearable robots. High-performance prostheses and orthoses (i.e., exoskeletons) could significantly improve the quality of life for millions of lower-limb amputees and stroke survivors, whose ambulation is slower, more asymmetric, less stable, and requires more energy than able-bodied individuals.
Wearable robots are currently designed for biomimetic behavior at the cost of simplicity. Most control strategies discretize the gait cycle into multiple distinct control models, each tracking reference joint torques, kinematics (angles/velocities), or impedances (stiffness/viscosity) that resemble human behavior. These increasingly complex designs are difficult to analyze for stability, tune to individuals, and generalize to different tasks, and their discretized control strategies are not necessarily robust to external perturbations that push joint kinematics forward or backward in the gait cycle. However, recent work on autonomous walking robots has produced time-invariant, provably stabilizing strategies from feedback control theory.
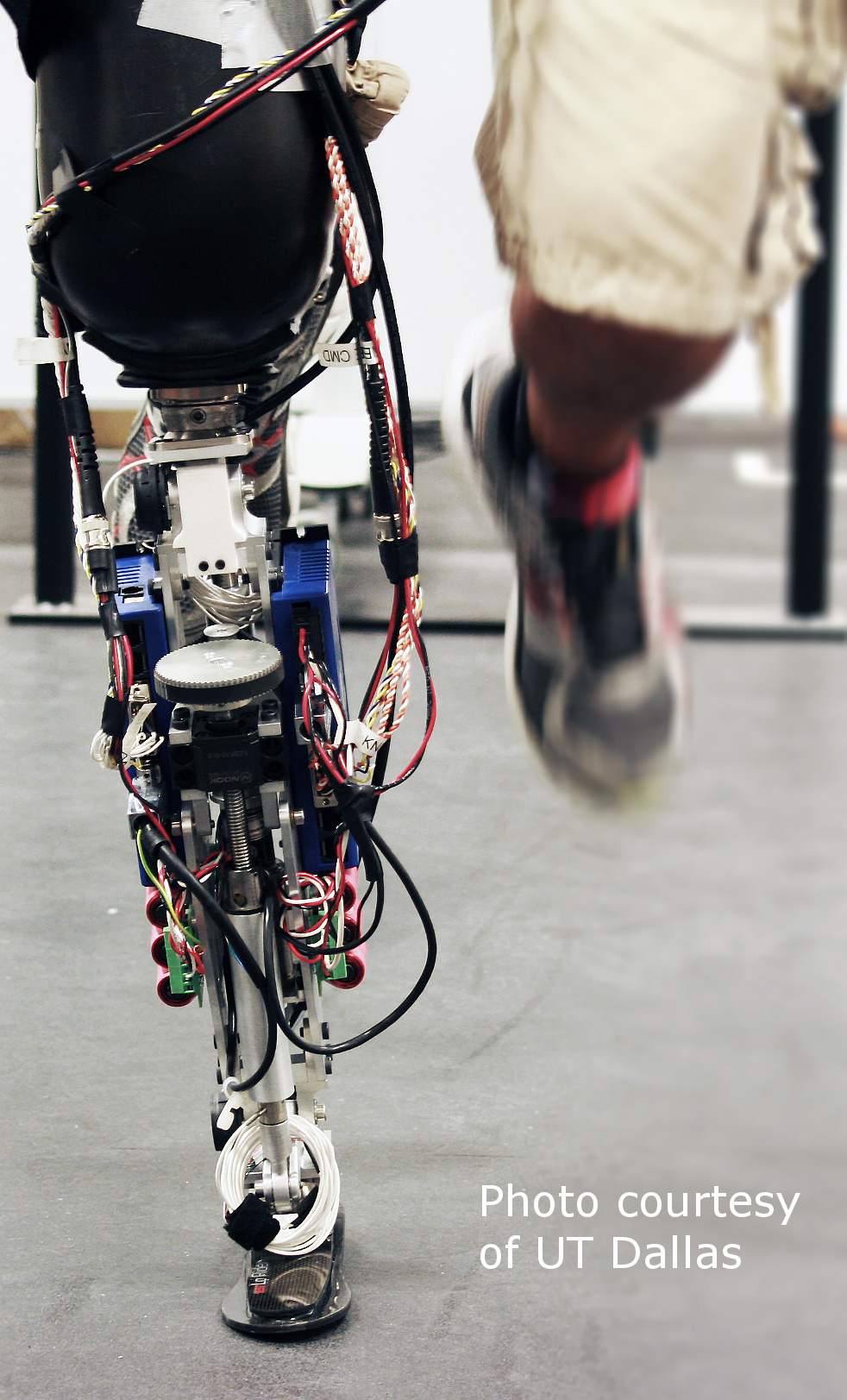
Using neuromechanical principles in the context of control theory, we are developing more natural, robust control strategies for powered prosthetic legs. We have designed a biomimetic kinematic constraint that drives joint patterns based on a mechanical representation of the gait cycle phase. We can virtually enforce this kinematic constraint with an output linearizing controller that uses only feedback available to sensors onboard the prosthetic leg. This work provides a single, biomimetic control law for the entire single-support phase during robot-assisted locomotion (TRO 14, ACC 13, ICORR 13). Experiments were conducted at the Center for Bionic Medicine of the Rehabilitation Institute of Chicago using the Vanderbilt leg, which is an experimental powered prosthesis developed by Michael Goldfarb and the Center for Intelligent Mechatronics.
The project described was supported by the National Center for Research Resources (NCRR) and the National Center for Advancing Translational Sciences (NCATS), National Institutes of Health (NIH) though Grant Number 3UL1 RR025741. The content is solely the responsibility of the authors and does not necessarily represent the official views of the NIH.

Robert De Moss Gregg, IV, Ph.D., holds a Career Award at the Scientific Interface from the Burroughs Wellcome Fund.
Mechanics of Gait Asymmetry
Dates: 2010-2011
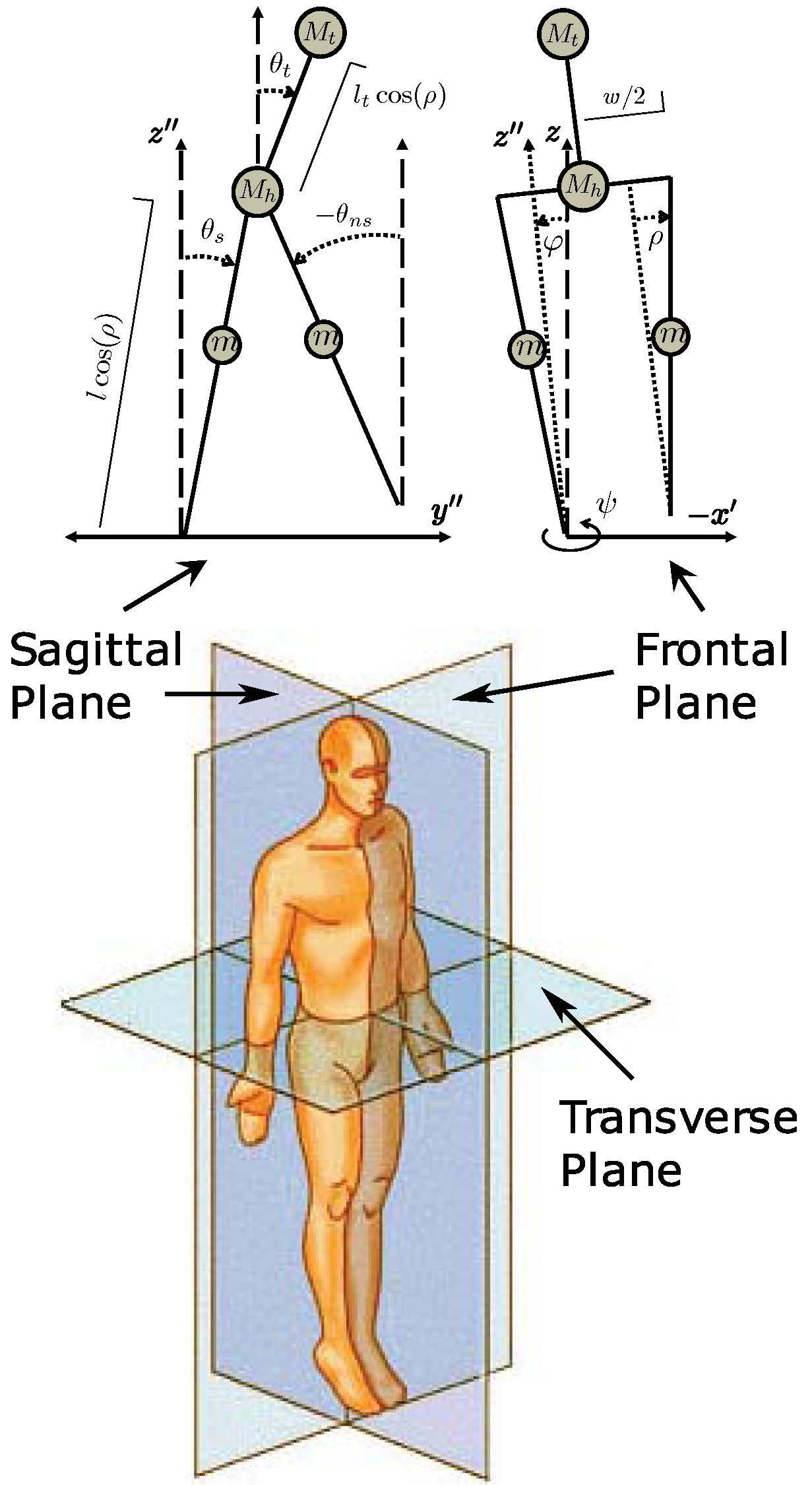
This work uses planar and 3D computational walking models to investigate the cause, function, and benefit of asymmetric patterns between the left and right legs in human gait. Small changes in (bilateral) physiological or environmental parameters cause the emergence and growth of asymmetry in kinematic and kinetic variables due to the phenomenon of spontaneous symmetry-breaking. We find that the legs have distinct biomechanical functions as proposed by the hypothesis of functional asymmetry, where one leg contributes more to propulsion and the other to body-weight support/transfer and motion control. These results suggest that body mechanics, independent of neurophysiological mechanisms such as leg dominance, may contribute to able-bodied gait asymmetry (TBME 12).

Figure: Anterior-posterior reaction force impulse for passive compass-gait biped and human.
Geometric Control of 3D Bipedal Dynamic Walking
Dates: 2006-2011
Background
The energetic efficiency of human bipedal locomotion is due primarily to its reliance on dynamic walking. During each step cycle, the body’s center of mass engages in a controlled fall along a pendular arc until foot-ground impact redirects this motion into the next step cycle. Evidence suggests that, using this type of locomotion, human bipeds are more energetically efficient than quadrupeds at low speeds.
Most humanoid robots to date, such as HRP-2 and Honda ASIMO, constrain their motion with an equilibrium condition called the Zero Moment Point (ZMP). These bipeds prevent foot-ground rotation (i.e., falling) by ensuring there is zero net moment at the center of pressure (COP), the point on the support polygon/footprint where the resultant ground reaction force acts. Having no passive falling phases, ZMP gaits often involve shuffling motion that is up to an order of magnitude less efficient than human walking in terms of energetic cost of transport (cf. Kuo, 2007; Collins and Ruina, 2005).
Asymptotically stable dynamic walkers can embrace ballistic momentum and gravitational potential energy for speed and efficiency, but these robots currently lack the same functionality as ZMP humanoids, e.g., some require downhill slopes for gravity-powered walking, are constrained to the sagittal plane-of-motion, lack directional control authority, and/or lack redundant joints for manipulation. Hybrid nonlinear dynamics make it difficult to analytically assure stability of a dynamic gait (especially in 3D space) — the robot state cannot be checked against closed-form balance conditions like the ZMP.
| Model | Control Strategy | Mechanical Cost of Transport |
| Honda ASIMO | Zero Moment Point | 1.6* |
| Human | Human | 0.05* |
| Cornell Biped | Passive Dynamics | 0.055* |
| Five-Link Biped (TAC 13) | Controlled Reduction | 0.057 |
Table: Work done per unit weight per unit distance *Collins and Ruina, 2005
Controlled Geometric Reduction
This motivates our research in geometric methods for decomposing complex dynamics into lower-dimensional control problems. In particular, we are developing the theory of controlled geometric reduction, which unifies passivity-based control and symmetry-based reduction. This method establishes controlled conservation laws that control cyclic variables and enable dimensionality reduction to meaningful submanifolds (e.g., the sagittal plane-of-motion). This is imposed by a passivity-based feedback transformation of the system Lagrangian into a special form of controlled Lagrangian with broken symmetry, which corresponds to an equivalent closed-loop Hamiltonian system with upper-triangular form (Dissertation). Controlled reduction can also be achieved with unactuated cyclic variables (TAC 13).
We proved a geometric property of serial kinematic chains — recursively cyclic variables — identifying extensive symmetries that can be exploited for reduction-based robot control (IJRR 10). We have generalized this result to branched kinematic chains, such as bipeds with torsos and articulated arms (CDC 09). This provides a motion synthesis procedure for dynamic walking in 3D environments by restricting the search for stable gaits to the sagittal plane-of-motion, where passive limit cycles often exist. Consequently, we have designed reduction-based control laws to achieve the first theoretical results in directional 3D dynamic bipedal walking (ACC 08).
Planning with Asymptotically Stable Gait Primitives
Dates: 2009-2010
The ZMP condition provides a simple guarantee that the supporting foot does not rotate and the robot does not fall, even though the posture or gait may not be stable. For this reason, ZMP motion planning and control strategies have so far dominated humanoid robotic walking. This project aims to enable motion planning for asymptotically stable dynamic walkers in the same way that planning is already possible for ZMP walkers. We do so by constructing a set of asymptotically stable “motion primitives” with safety guarantees that are amenable to established planning methods based on ZMP.
Controlled reduction induces periodic turning gaits from constant-curvature steering (IROS 09, CDC 09). These gaits naturally lean into the turn to compensate for centripetal forces, resulting in stable turning motion. Given a set of asymptotically stable walking gaits, we can model and analyze the biped as a discrete-time switched system, where the switching signal dictates the walking gait from step-to-step (ICRA 10). By properly constraining this switching signal, dynamically stable locomotion planning reduces to a simple tree search (each gait primitive is associated with a constant-curvature arc on the walking surface, which can be sequentially composed). Recent work details such planning algorithms for the supervisory switching control (TRO 12). This demonstrates the feasibility of fast and efficient dynamic walking in 3D space, despite challenges remaining in the mechanical design of such bipeds.